flybarless wiring
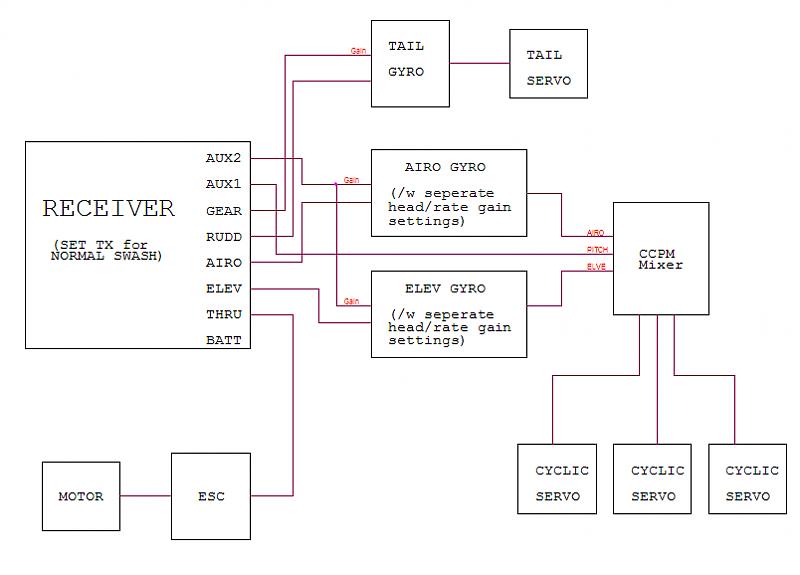
OK..then here go. This is how you would configure an CSM flybarless.
If you have mCCPM you don't need the cyclock or if you want to use your radio to do the eCCPM "you should" be able to drop the cyclock also.
Jonathan
OK..then here go. This is how you would configure an CSM flybarless.
If you have mCCPM you don't need the cyclock or if you want to use your radio to do the eCCPM "you should" be able to drop the cyclock also.
Jonathan



 factor.
factor.
Comment