Hi all
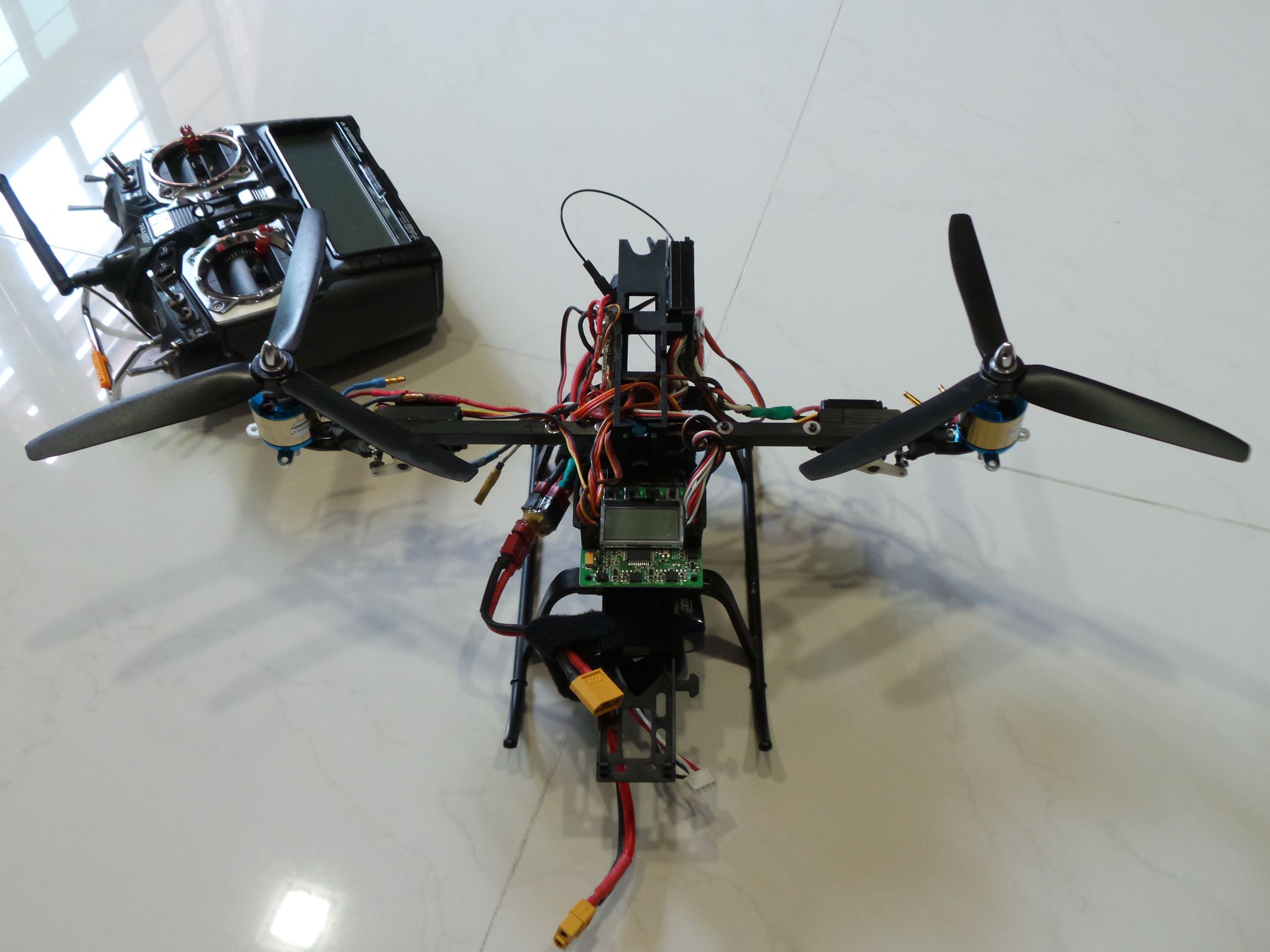
Here is my working in progress Dualcopter (or Bicopter). It is build from scratch from parts from:
1. Mini-Titan frame.
2. Align 1400kv motor.
3. GWS 3x propeller.
4. Castle Creations 35A and 25A (firmware upgrade and configure as Multicopter)
5. Batteries from my 500Size heli
6. Hitec Digital Servos
7. KK2.0 board (firmware in v1.6)
8. Hitec 6channel Aurora RX.
9. Square Carbon rod
10. TRex450's main blade grips
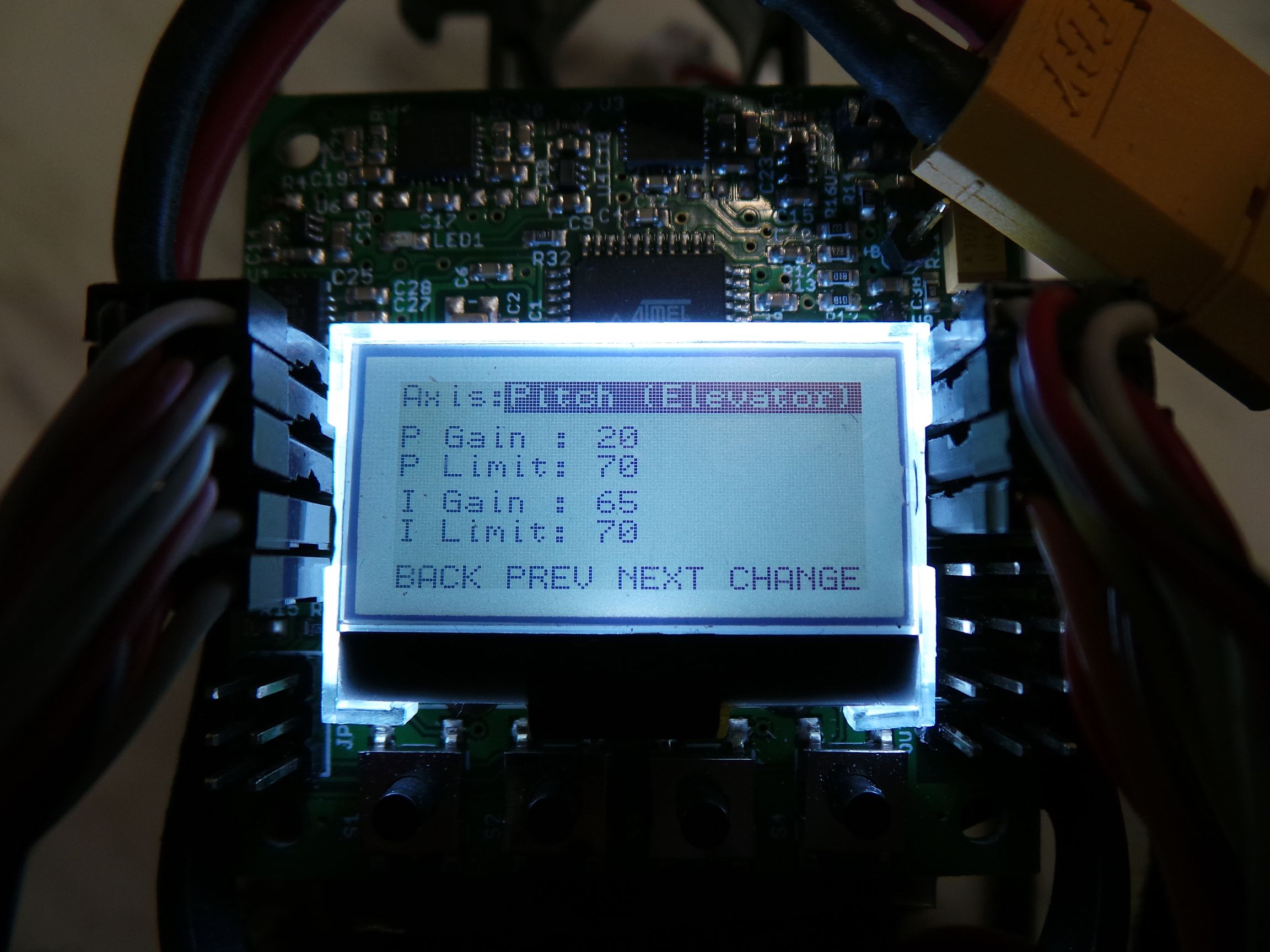
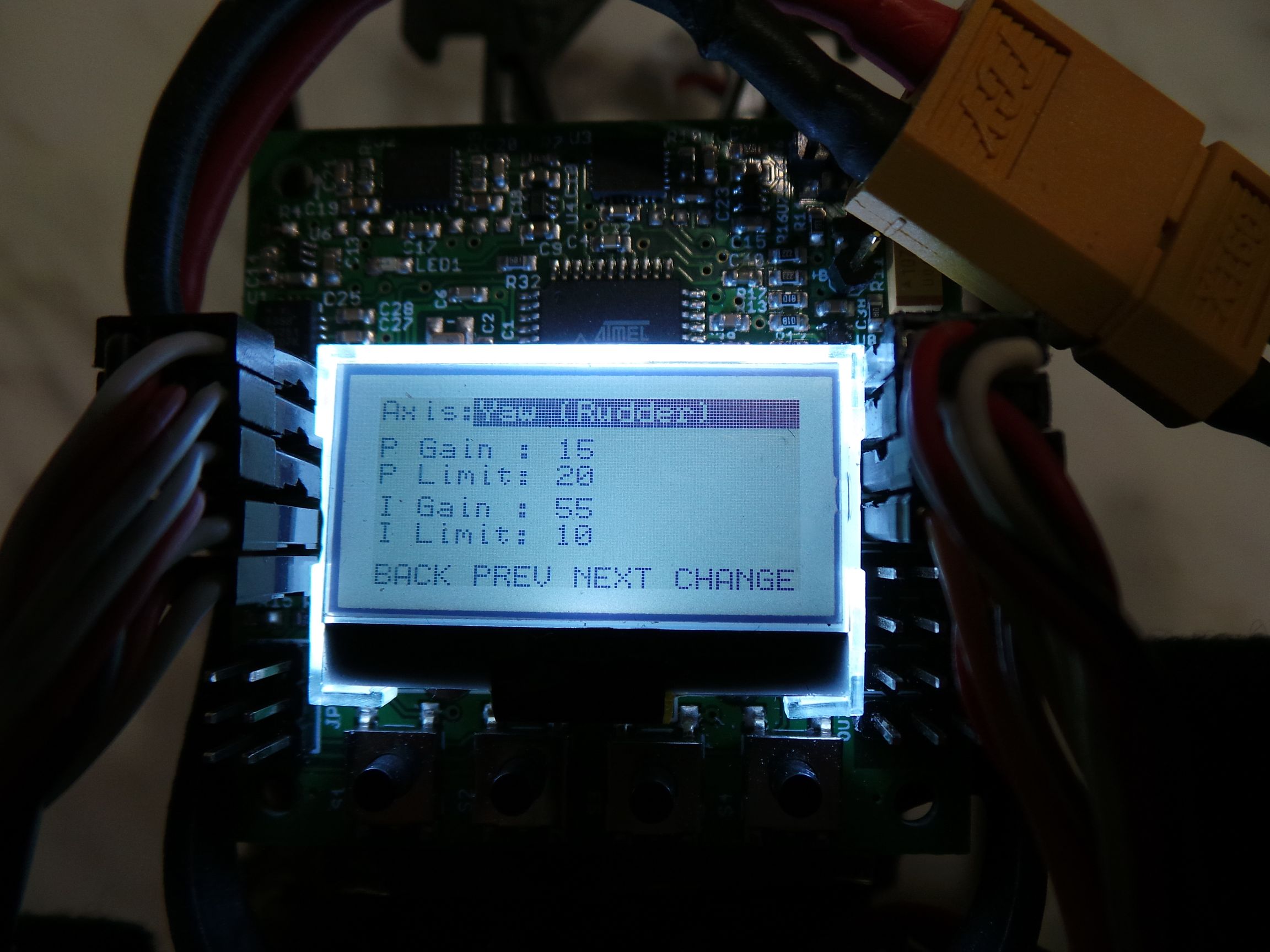
Difficulty.... Tuning the gyro sensors especially on the elevator.
Stability so far... Definitely not as stable as Quadcopter. This is due to there is no stability coming missing frontal and rear rotor/propeller. All the stability (elevator motion) is coming from the tilting the 2 rotor and required to be able to turn fast enough but not too fast and it encounter oscillation. That comes back to the above difficulty in tuning the elevator value in terms of P and I value (and limits).
So far able to hover in living room but still not satisfactory on the elevator gains.



Here is my working in progress Dualcopter (or Bicopter). It is build from scratch from parts from:
1. Mini-Titan frame.
2. Align 1400kv motor.
3. GWS 3x propeller.
4. Castle Creations 35A and 25A (firmware upgrade and configure as Multicopter)
5. Batteries from my 500Size heli
6. Hitec Digital Servos
7. KK2.0 board (firmware in v1.6)
8. Hitec 6channel Aurora RX.
9. Square Carbon rod
10. TRex450's main blade grips
Difficulty.... Tuning the gyro sensors especially on the elevator.
Stability so far... Definitely not as stable as Quadcopter. This is due to there is no stability coming missing frontal and rear rotor/propeller. All the stability (elevator motion) is coming from the tilting the 2 rotor and required to be able to turn fast enough but not too fast and it encounter oscillation. That comes back to the above difficulty in tuning the elevator value in terms of P and I value (and limits).
So far able to hover in living room but still not satisfactory on the elevator gains.





Comment