Got this from school as part of my fyp. While it is r/c, my project is unforunately, not the least bit related to r/c.
This is the Xaircraft X600...suppose to be cheap and budget, like the hobby city stuff of quad rotor. MADE IN CHINA. I think should be just $500 or so...and it definitely shows in the material used and capability(lack of) compared to our other flying objects.
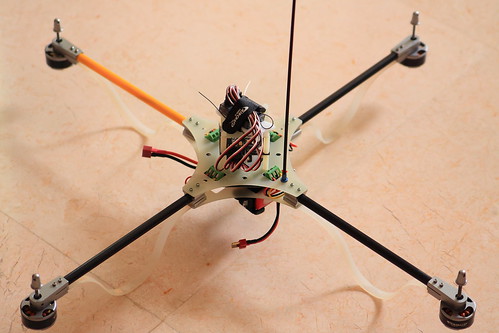
The whole thing w/o prop.
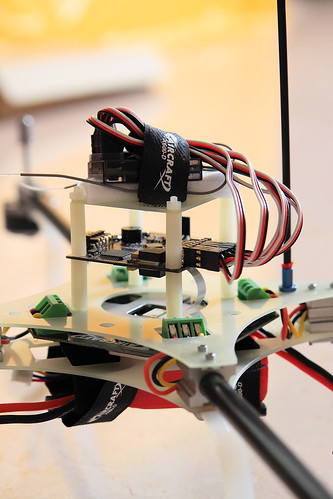
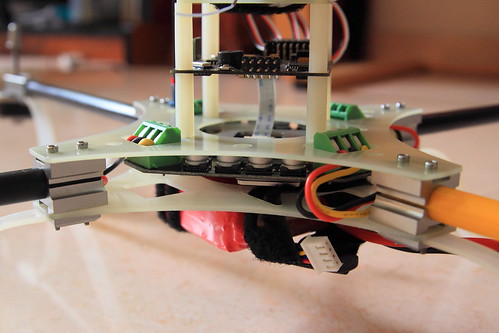
The brain, the rx, the esc...
It came with a multiplex rx...but being lazy to test what works with it or not, I just dump in a futaba 617fs. Does any one know if this works with ppm on futaba tx? The syn process is really just so simple like on the back of the rx?

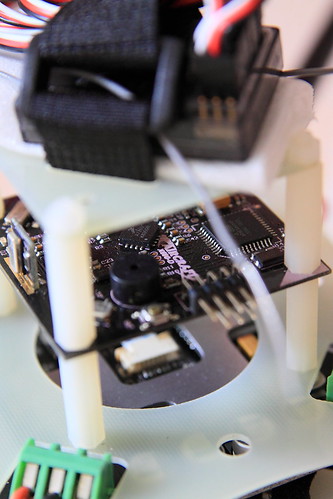
The brain to esc ribbon cable. Oh so fragile...
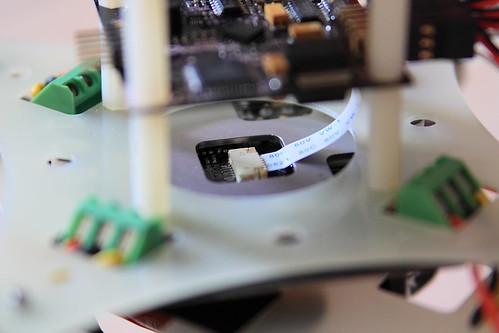
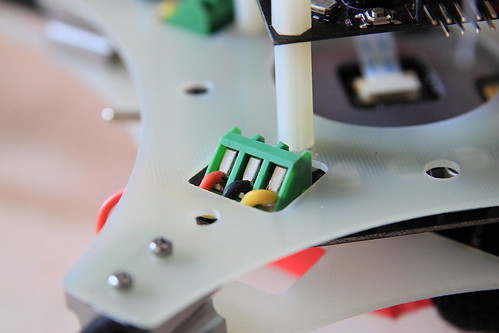
This esc is not like our generic esc. It is 4 esc built into one. Probably to save weight and reduce the amount of wire. I suspect they copied from somewhere... The whole plate with the 4 green connector is the esc.
The whole plate with the 4 green connector is the esc.
The motor connector. No bullets to solder.
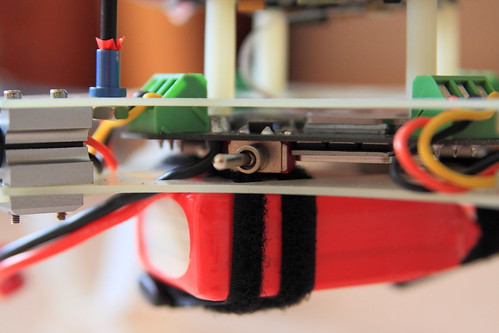
Even has a on/off switch,
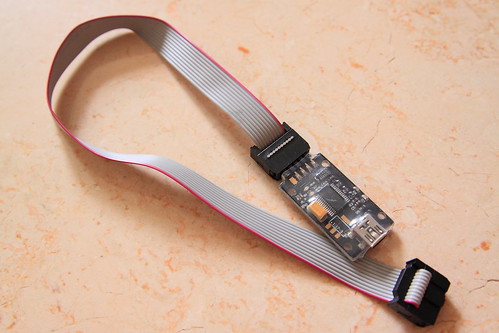
USB dongle. Similar to the castle creation usb link in size and shape. Also has led. Hope it doesn't burn out like my cc link.
This is the Xaircraft X600...suppose to be cheap and budget, like the hobby city stuff of quad rotor. MADE IN CHINA. I think should be just $500 or so...and it definitely shows in the material used and capability(lack of) compared to our other flying objects.
The whole thing w/o prop.
The brain, the rx, the esc...
It came with a multiplex rx...but being lazy to test what works with it or not, I just dump in a futaba 617fs. Does any one know if this works with ppm on futaba tx? The syn process is really just so simple like on the back of the rx?
The brain to esc ribbon cable. Oh so fragile...
This esc is not like our generic esc. It is 4 esc built into one. Probably to save weight and reduce the amount of wire. I suspect they copied from somewhere...
The whole plate with the 4 green connector is the esc.The motor connector. No bullets to solder.
Even has a on/off switch,
USB dongle. Similar to the castle creation usb link in size and shape. Also has led. Hope it doesn't burn out like my cc link.




 So this is really peanut to the school.
So this is really peanut to the school.
Comment