Hi, sorry but i am new to this place actually. i have some problems trying to do my tricopter actually. hopefully someone who has done it can provide suggestions to solve them!
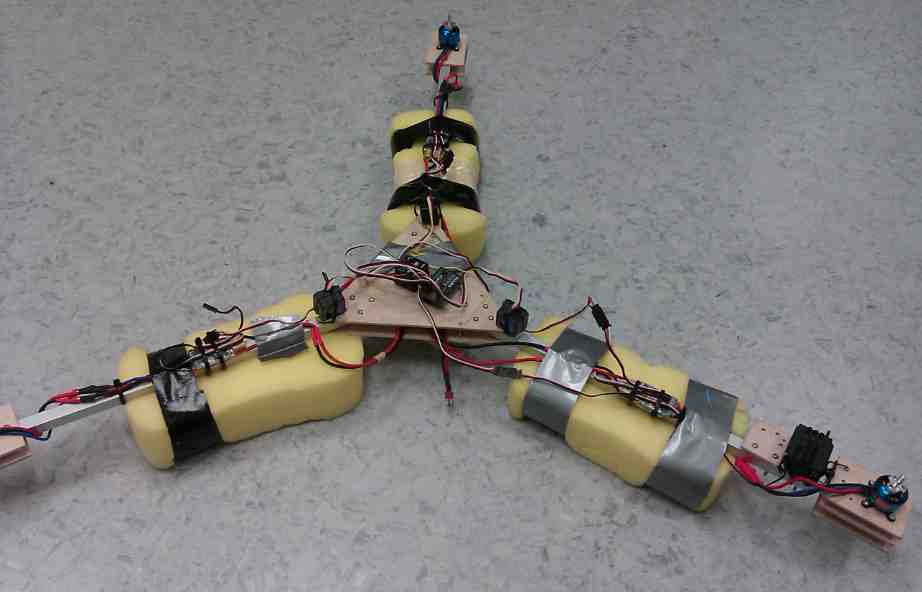
I'm using the following equipment for my tricopter:
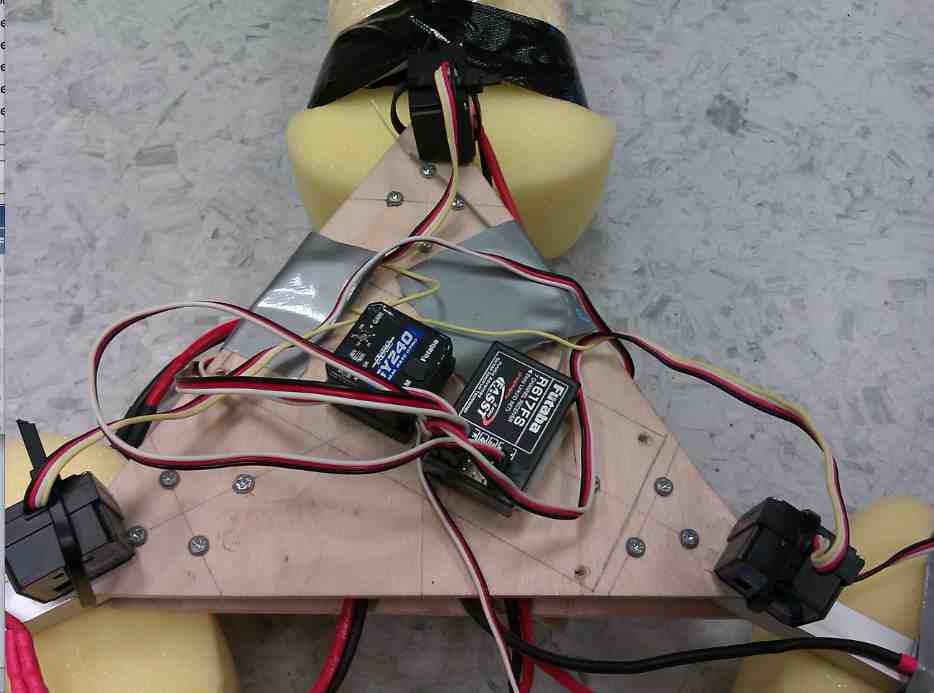
1 X Futaba GY240 AVCS Gyro (for yawing control)
3 X Tahmazo ER 2208/1100 brushless motors (for lift)
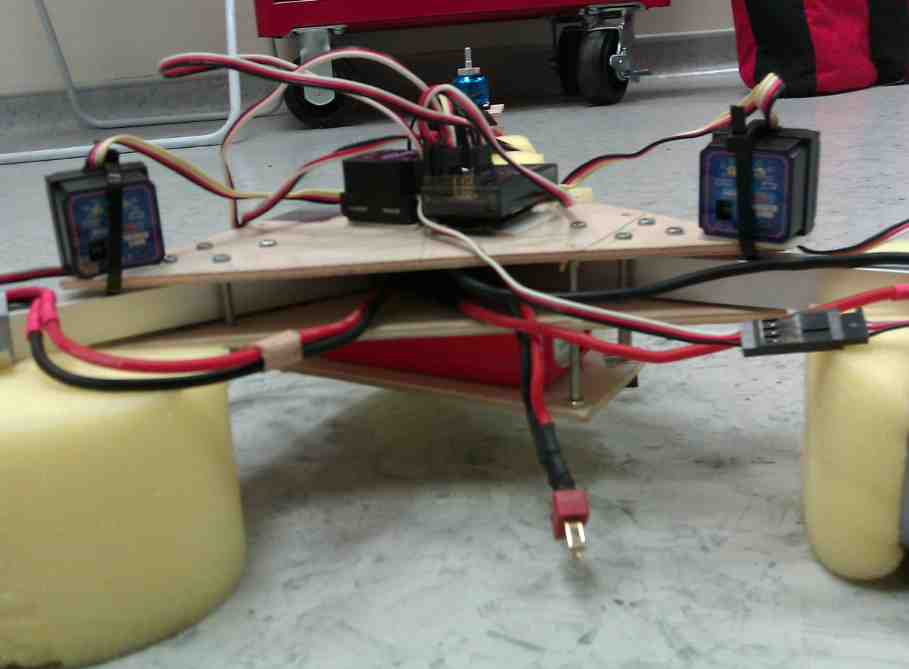
3 X Tahmazo Pro.C Max 3018-3s ESCs (1 connected to each motor)
1 X Futaba 7C TX with RX
1 X Tahmazo 26000mAh, 3-cell Li-Po battery
3 X Hobby King 401B AVCS Digital Head Lock Gyro
1 X yaw servo
2 X 10X4.7 puller blades
1 X 10X4.7 pusher blade
i used 120 degree CCPM (HR3) for the TX. the motors are connected to channels 1,2,6 while the gain for the motor's gyro are connected to channel 5. The yaw gyro uses manual gain though and it controls the yaw servo using channel 4.
i put 2 puller and 1 pusher blade for the motors, cos i thought there might be some torque due to blade motion and setting the puller and pusher blades to rotate at different directions will somewhat reduce the net torque though.
When i tried to power it up and fly, apparently one side of the arms have a higher rpm than the 2 others. As a result, it will tend to flop when the throttle is turned higher.
I tried to use swash settings to control. it's helpful but cannot totally eradicate the problem. Sorry for asking, but can anyhow explain what the swash setting is for in the tricopter use?
I tried trimming the controls also but somewhat it cannot totally solve the problem. the rpm outputs for the 3 motors can be almost the same after trimming but then the throttle stick is pushed higher, it drifts to one side then lopsides again, probably due to higher rpm for one of the motors also.
Has anyone experienced the same thing also? Hope someone can provide me with some expertise! Thanks!


I'm using the following equipment for my tricopter:
1 X Futaba GY240 AVCS Gyro (for yawing control)
3 X Tahmazo ER 2208/1100 brushless motors (for lift)
3 X Tahmazo Pro.C Max 3018-3s ESCs (1 connected to each motor)
1 X Futaba 7C TX with RX
1 X Tahmazo 26000mAh, 3-cell Li-Po battery
3 X Hobby King 401B AVCS Digital Head Lock Gyro
1 X yaw servo
2 X 10X4.7 puller blades
1 X 10X4.7 pusher blade
i used 120 degree CCPM (HR3) for the TX. the motors are connected to channels 1,2,6 while the gain for the motor's gyro are connected to channel 5. The yaw gyro uses manual gain though and it controls the yaw servo using channel 4.
i put 2 puller and 1 pusher blade for the motors, cos i thought there might be some torque due to blade motion and setting the puller and pusher blades to rotate at different directions will somewhat reduce the net torque though.
When i tried to power it up and fly, apparently one side of the arms have a higher rpm than the 2 others. As a result, it will tend to flop when the throttle is turned higher.
I tried to use swash settings to control. it's helpful but cannot totally eradicate the problem. Sorry for asking, but can anyhow explain what the swash setting is for in the tricopter use?
I tried trimming the controls also but somewhat it cannot totally solve the problem. the rpm outputs for the 3 motors can be almost the same after trimming but then the throttle stick is pushed higher, it drifts to one side then lopsides again, probably due to higher rpm for one of the motors also.
Has anyone experienced the same thing also? Hope someone can provide me with some expertise! Thanks!




Comment