Good news on the launch of the value for $ flight controller that support both the MWC and MegaPirateNG code.
With the latest code, you will be able to add GPS for Position Hold
We have the board at very attractive price and with very special bundle for option items.
As the product description is long, I will not list all here. You can get the detail at this link
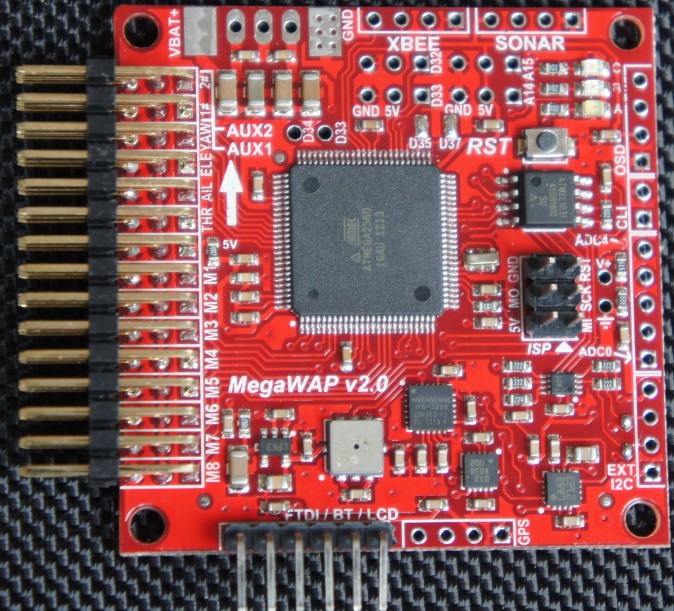
MegaWAP V2 ALL IN ONE Multi-Copter Flight Controller Support both MWC and MegaPirate
Features:
- Supports opensource code from: MegaPirateNG and MultiWii firmware
- Up to 8 motor output
- 6 + 2 input channels for standard receiver
- 4 serial ports for debug/LCD/Bluetooth Module/OSD/GPS/telemetry
- 2 servos output for PITCH and ROLL gimbal system
- A servos output to trigger a camera button
- 6 Analog output for extend device plus Sonar port
- A I2C port for extend sensor or device, also ready for future sensors board upgrade
- Separate 3.3V and 5V LDO voltage regulator
- ATMega 2560 Microcontroller
- ITG3205 3-axis digital gyroscope
- BMA180 3-axis accelerometer
- BMP085 pressure sensor
- HMC5883L magnetometer sensor (electronic compass)
- On board logic level converter
- Use standard pin for IO connection
- Board Dimension: 50mm x 50mm
- Mounting hole: 45mm by 45mm
- Manufacturing according to the standard of RoHS
Flight mode for Multiwii
- Acro (default mode)
- Level (auto level)
- Alt Hold
- Head Lock
- HeadFree (CareFree)
- GPS Hold (require GPS receiver)
- GPS Return to home position (require GPS receiver)
Flight mode for MegaPirate
- Acro
- Stable
- Alt Hold
- Loiter (require GPS)
- Guided (require GPS)
- Position (require GPS)
- RTL (require GPS)
With the latest code, you will be able to add GPS for Position Hold
We have the board at very attractive price and with very special bundle for option items.
As the product description is long, I will not list all here. You can get the detail at this link
MegaWAP V2 ALL IN ONE Multi-Copter Flight Controller Support both MWC and MegaPirate
Features:
- Supports opensource code from: MegaPirateNG and MultiWii firmware
- Up to 8 motor output
- 6 + 2 input channels for standard receiver
- 4 serial ports for debug/LCD/Bluetooth Module/OSD/GPS/telemetry
- 2 servos output for PITCH and ROLL gimbal system
- A servos output to trigger a camera button
- 6 Analog output for extend device plus Sonar port
- A I2C port for extend sensor or device, also ready for future sensors board upgrade
- Separate 3.3V and 5V LDO voltage regulator
- ATMega 2560 Microcontroller
- ITG3205 3-axis digital gyroscope
- BMA180 3-axis accelerometer
- BMP085 pressure sensor
- HMC5883L magnetometer sensor (electronic compass)
- On board logic level converter
- Use standard pin for IO connection
- Board Dimension: 50mm x 50mm
- Mounting hole: 45mm by 45mm
- Manufacturing according to the standard of RoHS
Flight mode for Multiwii
- Acro (default mode)
- Level (auto level)
- Alt Hold
- Head Lock
- HeadFree (CareFree)
- GPS Hold (require GPS receiver)
- GPS Return to home position (require GPS receiver)
Flight mode for MegaPirate
- Acro
- Stable
- Alt Hold
- Loiter (require GPS)
- Guided (require GPS)
- Position (require GPS)
- RTL (require GPS)
Attached Files





Comment