If this is your first visit, be sure to
check out the Rules and Help. You may have to register
before you can post: click the register link above to proceed. To start viewing messages,
select the forum that you want to visit from the selection below.
looks very smooth and stable. but why the camera has a bit of the jello effect?
That's because the original video was even worse but youtube managed to stabilize it however it can't remove the rolling shutter(jello) effect. Had another successful flight today most of the jello is gone after balancing the rear prop, but I ended up frying up one of the ESC because I didn't connect the right polarity.
Nice! u were flying at the open field near amk Courts,right? i'm staying quite near there.
Yep that's it. Too bad they're going to build another condo there. Was tempted to go even higher but common sense prevails, that's how I crashed my Quadcopter when I flew it too far and lost orientation.
Shakes removed by youtube after upload. Rear propeller was unbalanced but has since fixed. Great machine to fly, forgiving flying characteristics. KKboard Kapteinkuk 1.6 firmware.
Yep I saw your videos on youtube earlier this year when I just got the kit, some great shots and flying man! I could have flown earlier but I had a troublesome Futaba receiver sending jitters to the servo. I changed to a Turnigy 9x system and problem solved.
Yep I saw your videos on youtube earlier this year when I just got the kit, some great shots and flying man! I could have flown earlier but I had a troublesome Futaba receiver sending jitters to the servo. I changed to a Turnigy 9x system and problem solved.
I see, cool.
I also fought some problems initially with my KK+ 5.5e with Spektrum set up. Eventually seemed to be traced to RX brownouts and has not happened again since adding a capacitor across the 5V, and using a dedicated UBEC instead of using the 5V from the Plush18A.
Now I am trying to choose an affordable flight controller that has stable mode and altitude hold, magnetometer and GPS-hold. I don't know how the locally developed MWC board by silver is doing...
I see, cool.
I also fought some problems initially with my KK+ 5.5e with Spektrum set up. Eventually seemed to be traced to RX brownouts and has not happened again since adding a capacitor across the 5V, and using a dedicated UBEC instead of using the 5V from the Plush18A.
Now I am trying to choose an affordable flight controller that has stable mode and altitude hold, magnetometer and GPS-hold. I don't know how the locally developed MWC board by silver is doing...
Interesting, didn't know that a UBEC can reduce the noise, also just found out what it does, maybe I'll get one to see if it eliminates the jitter problem. Perhaps my Futuaba receiver is a bit sensitive to that. Physically there are no defects, I popped it open and don't see any cracks or broken solder joints and it still functions properly across all channels when I plugged in the battery and ran the transmitter. It seemed to survive my T580 crash pretty well. I tried using a ferrite toroid on the servo extension but it didn't remove the jitters.
I'm so happy with my current Tricopter that I am planning to build another one based on the original V2.5 design by David Windestal. I have ordered his CNC fiber board frames and intend to build the new one purely for sport flying.
Interesting, didn't know that a UBEC can reduce the noise ...
In theory a switching BEC ("UBEC" are switching type) may be noisier than a linear BEC.
I don't know if my Spektrum RX drop-outs were due to noise or voltage sags. I was guessing it was voltage sags, that's why I changed to a dedicated UBEC and a large capacitor (10V, 4700 uF) across the 5V.
I like originally chose Tricopter because I thought orientation would be easier to see compared with quad.
However, if I had a flight controller capable of self-levelling and GPS hold, then I needn't worry so much about orientation.
Furthermore it seems cutting-edge flight controllers usually support quads first, before adding support for tricopter.
So I was thinking for my next (2nd) multirotor, I may choose quad...
In theory a switching BEC ("UBEC" are switching type) may be noisier than a linear BEC.
I don't know if my Spektrum RX drop-outs were due to noise or voltage sags. I was guessing it was voltage sags, that's why I changed to a dedicated UBEC and a large capacitor (10V, 4700 uF) across the 5V.
I like originally chose Tricopter because I thought orientation would be easier to see compared with quad.
However, if I had a flight controller capable of self-levelling and GPS hold, then I needn't worry so much about orientation.
Furthermore it seems cutting-edge flight controllers usually support quads first, before adding support for tricopter.
So I was thinking for my next (2nd) multirotor, I may choose quad...
The Naza FC looks like an attractive option, unfortunately the only Tricopter it supports so far is the Y6 configuration. Most stores are selling it for less than $300, I'm very tempted to pick one up for my Quad.
Now I am trying to choose an affordable flight controller that has stable mode and altitude hold, magnetometer and GPS-hold. I don't know how the locally developed MWC board by silver is doing...
It's been done, i can let you test fly my demo set if you fly mode 1.
You can now fly really far, getting it back is easy.
My patience waiting for the extra ESCs to arrive and lots of practice on Phoenix RC's Gaui simulator paid off.
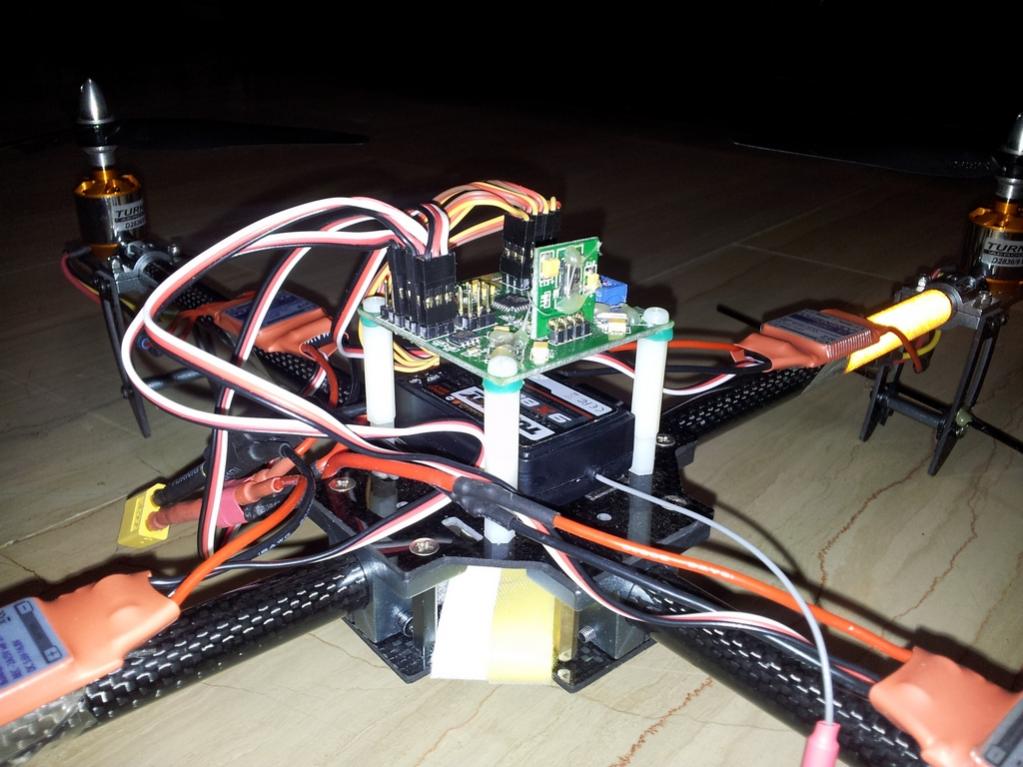
I Raised my KKboard with nylon spacers and some silicone grommets , 18A Turnigy ESCs finally arrived from Hobby-King yesterday. Flashed in new Acro version of Kapteinkuk's 4.7 Xcopter firmware. Took sometime to re-calibrate and tune the pots, now this thing is very smooth, stable and easy to fly. Very pleased with the performance.
Raised the KKboard with nylon spacers, seems to improve the stability. Board is no longer stuck on top of the receiver.
Replaced 2 new Turnigy 18A ESCs and re-calibrated them individually. I replaced the hobbywing 25A ESC with a Turnigy 18A to keep it consistent.







Comment