I decided to try out an idea about the gyro postition and tail wag on the hornet.
My theory was that due tot gyros picking up only angular displacement that you could de sensitise the gyro by moving the gyro further away from the main shaft.
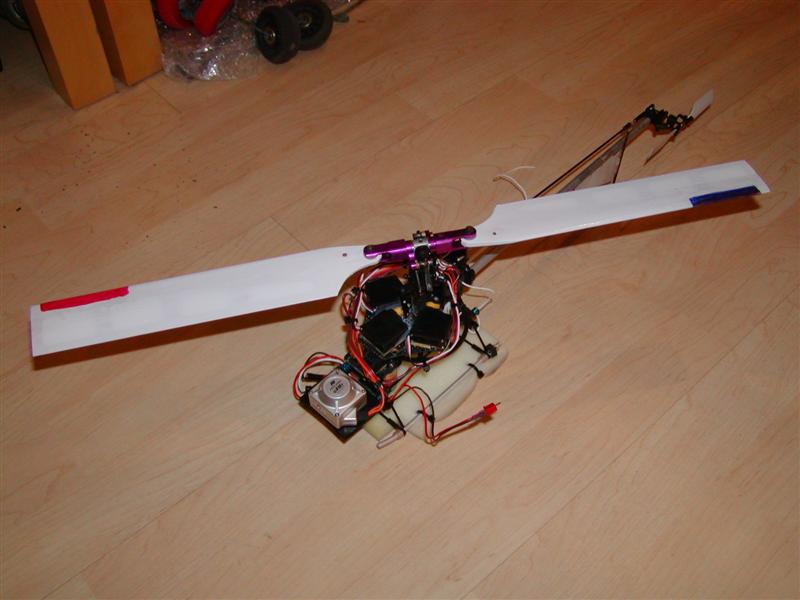
My inital test show that this is the case ..my FBL hornet ( which is flying great now..even did some fig 8's! ) I moved the gyro from behind the main shaft to out the front of the heli ..this allowed me to move the gain from about 5% to about 30% on the gyro.
I would strongy like to hear od any other gain settings and positions of the gyro.
cheers doug
My theory was that due tot gyros picking up only angular displacement that you could de sensitise the gyro by moving the gyro further away from the main shaft.
My inital test show that this is the case ..my FBL hornet ( which is flying great now..even did some fig 8's! ) I moved the gyro from behind the main shaft to out the front of the heli ..this allowed me to move the gain from about 5% to about 30% on the gyro.
I would strongy like to hear od any other gain settings and positions of the gyro.
cheers doug

 Well it ended up hitting the Tx.
Well it ended up hitting the Tx.
Comment